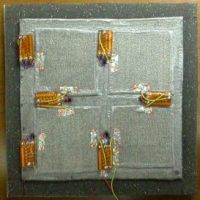
We combined "Nonlinear tactile element" and "Cell-bridge system" to develop a 2x2 sensor array.
CMOS LSI sensor/communication chips are arranged at the boundaries of the sensor elements.
The chips measure the capacitances between the conductive layers and send signals through the same layers.
Fig.1 Robot skin prototype. (Top and bottom views)
Takayuki Hoshi, Akimasa Okada, Yasutoshi Makino, and Hiroyuki Shinoda:
A Whole Body Artificial Skin Based on Cell-Bridge Networking System,
Proc. 3rd International Conference on Networked Sensing Systems (INSS 2006), pp. 55-60, Rosemont, Illinois (USA), 31 May - 2 Jun., 2006.
Takayuki Hoshi and Hiroyuki Shinoda:
Robot Skin Based on Touch-Area-Sensitive Tactile Element,
Proc. 2006 IEEE International Conference on Robotics and Automation
(ICRA 2006), pp. 3463-3468, Orlando, Florida (USA), 15-19 May, 2006.