Fig.1 Characteristics of human tactile.
We cannot number stimulations (upper),
but we can detect sharpness of them (lower).
|
|
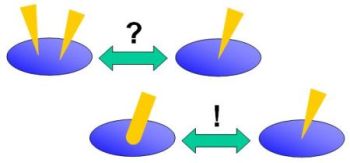
Fig.1 Characteristics of human tactile. We cannot number stimulations (upper), but we can detect sharpness of them (lower). | ||