Fig.1 Tactile sensor skin.
It is soft, stretchable, and capable of covering a large area.
Measured data are multi-hopped
by sensor/communication chips. (Cell-bridge system)
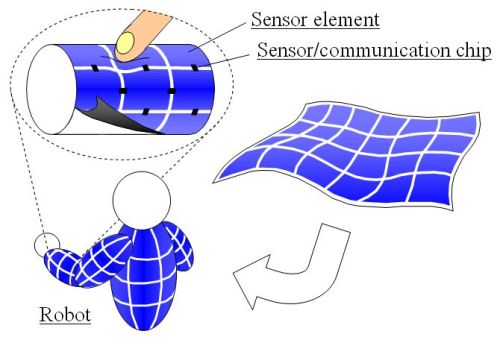
Fig.1 Tactile sensor skin. It is soft, stretchable, and capable of covering a large area. Measured data are multi-hopped by sensor/communication chips. (Cell-bridge system) |
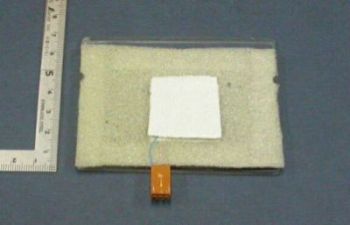 Fig.2 Sensor element. | ||
Fig.3 Outputs of sensor element (Capacitance variations). A capacitive sensor element consisting of two layers of compressible insulators which have different hardness. Not only contact force but also contact area are estimated from the capacitance variations of the two layers. |