新しい触覚センシング 〜鋭さ検出〜
>> BACK
人間は、ものを触ってその性質(表面の粗さや硬さなど)を感じ取る高度な皮膚触覚を持っています。
しかし実は、皮膚触覚の分解能は意外と粗いことがわかっています(二点弁別閾* が数cm程度)。
一方で、そのように粗い分解能でも物体の鋭さについては非常によく判別できるという特性もあります。
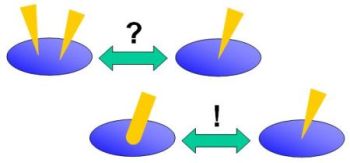
図1 人間の皮膚触覚の特性
刺激が1つか2つは判断がつかないのに(上)、
刺激の鋭さは感度よくわかる(下)。
そのような『ある領域内の刺激の個数はわからないけれどその鋭さはわかる』という特性にヒントを得て、
我々は新しい触覚センシング手法を提案しています。
それはセンサ素子を数cm角とし、その領域内で
接触力だけでなく接触面積も取得する
方法です。
センサ素子が大きいのでロボット表面のように広い面積を覆う柔軟な人工皮膚を容易に実現でき**、
また接触面積(≒物体の鋭さ)を取得するので人間と同様の触感を得ることができると期待しています。
* 二点弁別閾 :
2点の刺激を判別できる最小の距離のこと。 指先では1mm程度と小さいが、前腕部で2cm、背中で5cmにもなる。
例えば腕の1cm程度離れた2点を2本の鉛筆で同時に突っついても、人間には1点にしか感じられない。
** センサ素子が大きいので・・・ :
接触力のみを取得するセンサ素子を用いた研究もされていますが、 それらを用いて『鋭さ』のような情報を取得するためには
デジタルカメラの画素数を上げるように、1mm角程度のセンサ素子を高密度に配列して分解能を上げる必要があります。
現在、柔軟性を保ちつつ数百万個のセンサ素子に配線をする技術が存在せず、 人工皮膚開発の大きな課題となっています。
公開 : 2005/04/01
更新 : 2005/09/22
星 貴之 :
star(at)alab.t.u-tokyo.ac.jp