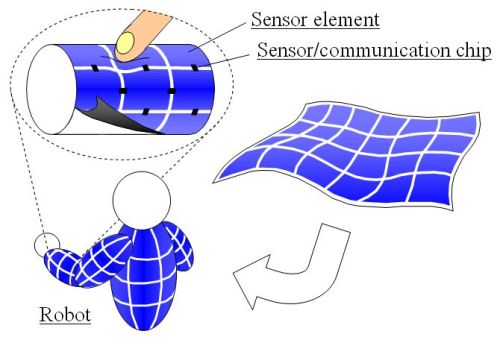
図1 人工皮膚
ロボットの全身を包み込む柔軟な触覚センサスキンを目指す。
境界の計測/通信チップがデータを転送する。(セルブリッジシステム)
図1 人工皮膚 ロボットの全身を包み込む柔軟な触覚センサスキンを目指す。 境界の計測/通信チップがデータを転送する。(セルブリッジシステム) |
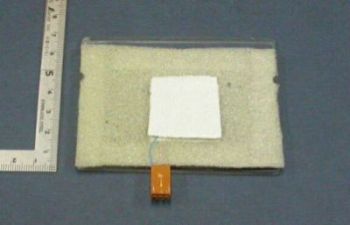 図2 センサ素子 正方形の導電繊維の領域がひとつのセンサ素子。 これを複数並べて人工皮膚を構成する。 | ||
図3 センサ出力プロット(静電容量の変化) 刺激素子の太さによって描く軌跡が異なる。 また、押す力が大きくなると軌跡が伸びるので力の大きさもわかる。 |