図1 センサ素子断面図
厚さ2mmの軟らかい発泡ウレタンと
硬い発泡ウレタンを重ね、
3cm×3cmの導電繊維3枚ではさんだ構造。
導電繊維間の静電容量C1とC2を計測する。

|
|
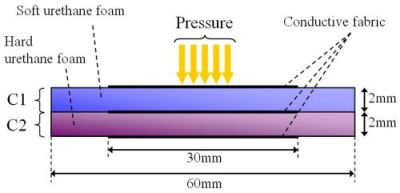
図1 センサ素子断面図 厚さ2mmの軟らかい発泡ウレタンと 硬い発泡ウレタンを重ね、 3cm×3cmの導電繊維3枚ではさんだ構造。 導電繊維間の静電容量C1とC2を計測する。
| ||
|
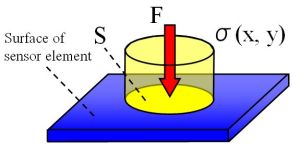
図2 問題設定 円形の接触面内で一様な表面応力分布σを考えます。 知りたいのは接触力Fと接触面積Sです。 通常の圧力センサにはSを知る能力はありません。 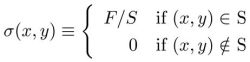
| ||
|
図3 非線形弾性 発泡ウレタンは軟らかい(ヤング率とポアソン比が小さい)ので、 強く押されると限界まで圧縮され、それ以上圧縮されなくなります。 その性質が、下式のエントロピー弾性* で表されると仮定します。 軟らかい発泡ウレタンλ1は弱い圧力でも限界まで圧縮されます。 
| ||
|
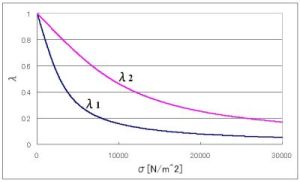
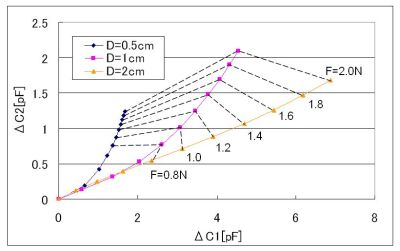
図4 シミュレーション(静電容量の変化) 非線形弾性と硬さの違いのため (ΔC1, ΔC2)はD(Sの直径)によって異なる曲線に載り、 またFが大きくなると原点からの距離が大きくなります。 このプロットをあらかじめ調べておけば、 静電容量から接触力と接触面積を知ることができます。 | ||