開発環境 HEW4 から、UART 通信により動作プログラムを書き込む。(具体的な操作は「R8C/Tiny 開発環境」参照)
シリアルポートが PC にない場合は、USB - シリアル変換ケーブルを使用する。
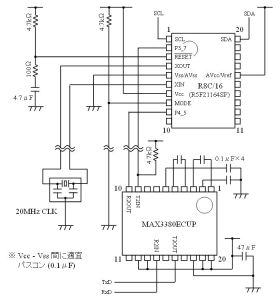
図1 プログラム書き込み。(→拡大図)
-
RESET 端子の 4.7μF は、電源投入時に RESET を Vcc より遅れて立ち上がらせるため。
数 ms の時間を稼げればよいので、0.1μF 程度でも十分。100Ω は保護抵抗。
これらは用心のためで、実はパワーオンリセット機能(プルアップのみ)で十分かも知れない。 -
P3_7、P4_5 はプログラム書き込みに使われる通信用端子。
P3_7 のプルアップは、プログラム書き込みを安定して行うために必要。 -
MAX3380ECUP はラインドライバ。
マイコンの 0V ~ 3.3V(or 5V)とシリアルポートの -12V ~ 12V を相互に変換するため。 - 波線より下は、プログラム書き込み時以外に切り離してよい部分。
-
プログラム書き込み時、20MHz クロックを接続しておく必要があった。
外部で生成したクロック波形を入れる場合は、XIN に接続し、XOUT を開放にする。
スタンドアローンで使うときには、8MHz 内部クロックに設定すれば 20MHz は必要ない。 -
プログラム書き込み時、RESET を一旦 Vss に落として人為的にリセットする必要があった。
(リセットするまで 20MHz クロックが発振しないため)
スタンドアローンで使うときには、単に電源投入するだけでよい。 -
この構成で 3.3V 駆動したとき、消費電流は 10mA 程度。
スタンドアローンのときは、3mA 程度だった。
1-2. R8C/16 からのデータ読み込み
USB-to-I2C Pro を介して、I2C 通信(IIC 通信)によりデータを読み込む。
PC は常にマスターとして動作し、マイコンのスレーブアドレスを指定して通信を行う。
(UART によるデータ取得は短講資料「Tiny マイコンを使ってみよう!」参照)

図2 データ読み込み。(→拡大図)
- SCL はクロックライン、SDA はデータライン。I2C 通信は複数のデバイスを接続することができる。
-
SCL、SDA はオープンドレインなので、適当な抵抗でプルアップしておく必要がある。
一応、USB-to-I2C の回路内でもプルアップされている。 - マイコン動作プログラムのサンプルが R8C/Tiny シリーズページの "アプリケーションノート" からダウンロードできる。
-
USB-to-I2C には DLL が付属しており、
PC 側のプログラムでは(1)通信速度の設定と(2)読み出しの関数を実行するだけでよい。